|
Antrieb |
  
|
| Show/Hide Hidden Text |
|
Antrieb |
|
| Show/Hide Hidden Text |
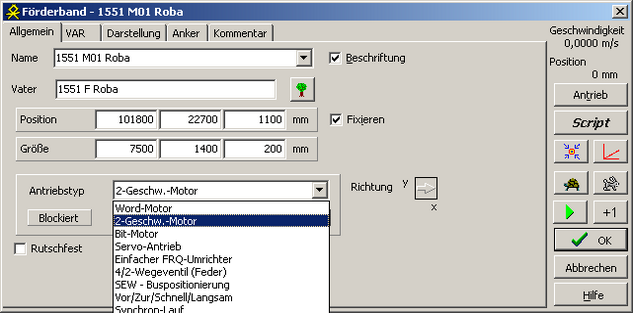
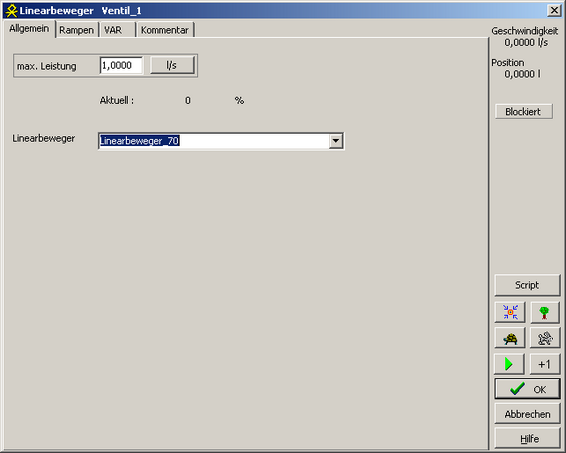
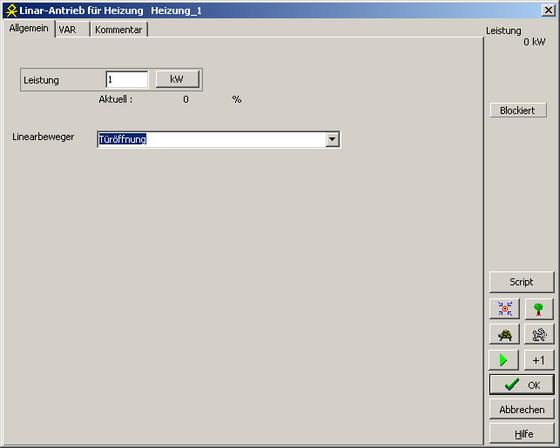
Der Antrieb kommt nie alleine vor, sondern ist immer Bestandteil eines anderen Elementes, wie Linearbeweger und Förderbänder. Ein Antrieb übersetzt Ausgänge der SPS in Geschwindigkeiten oder Positionen.
Es gibt verschieden Arten von Antrieben:
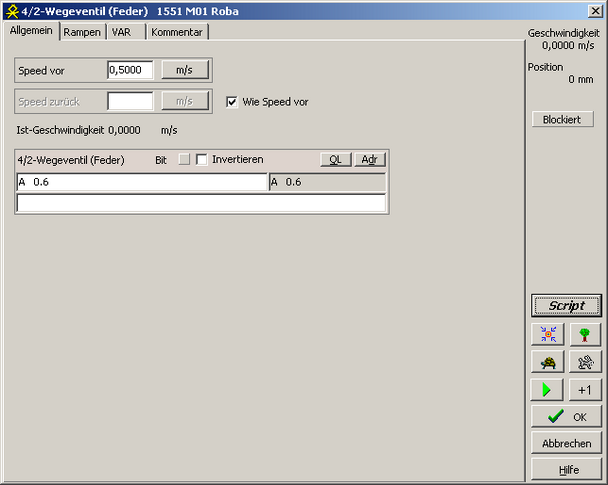
Dieser Antrieb kann mit einer Geschwindigkeit vor- und zurück fahren. Sie können entweder ein oder zwei SPS-Ausgänge angeben. Außerdem können Sie Vorwärts/Rückwärts mit Impulsverhalten wählen. In diesem Fall verhält sich der Antrieb wie ein 5/2-Wegeventil mit Impulsverhalten. |
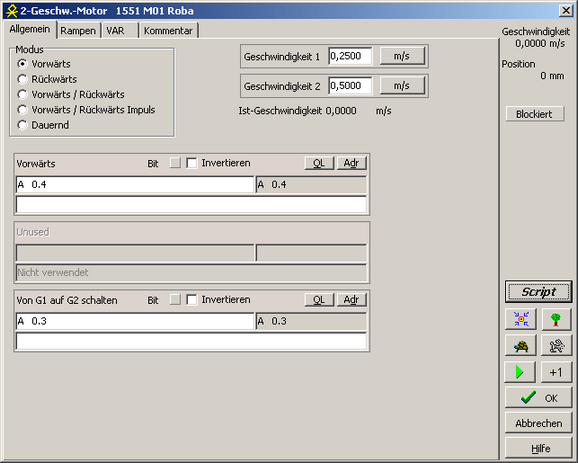
Hier können Sie noch ein weiteres Bit "schnell" angeben sowie die entsprechende Geschwindigkeit. |
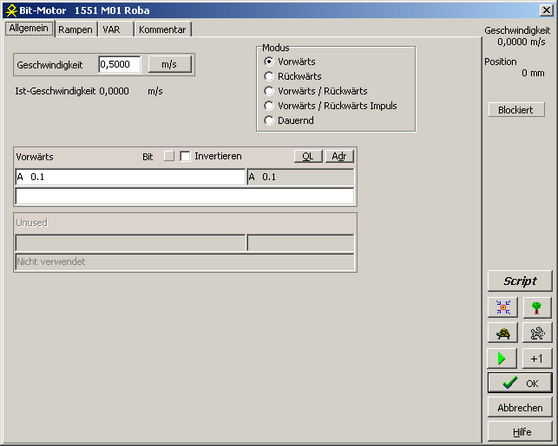
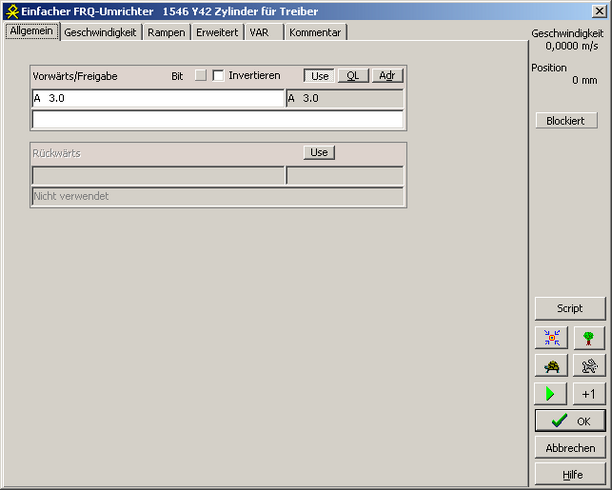
Hier brauchen Sie nur einen SPS-Ausgang angeben, ist er gesetzt, fährt der Antrieb vor, ist er nicht gesetzt, fährt der Antrieb zurück. |
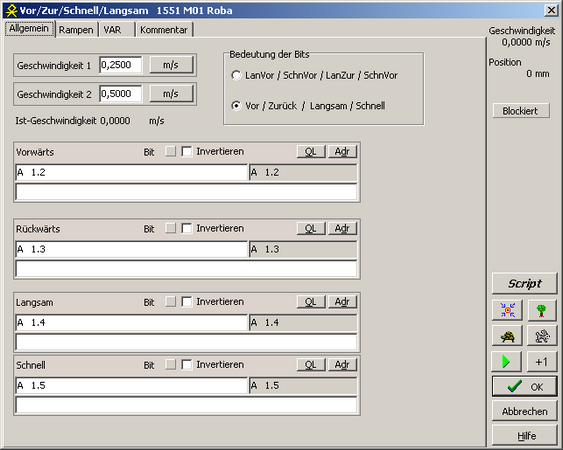
Hier werden Richtung und Geschwindigkeit über vier Bits vorgegeben. |
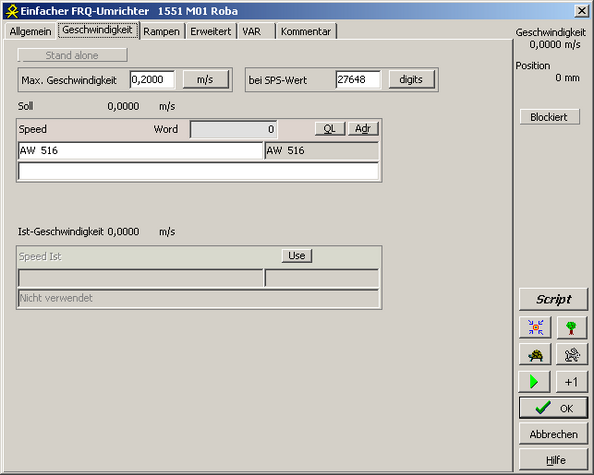
| • | Einfacher Frequenzumrichter mit variabler Geschwindigkeit |
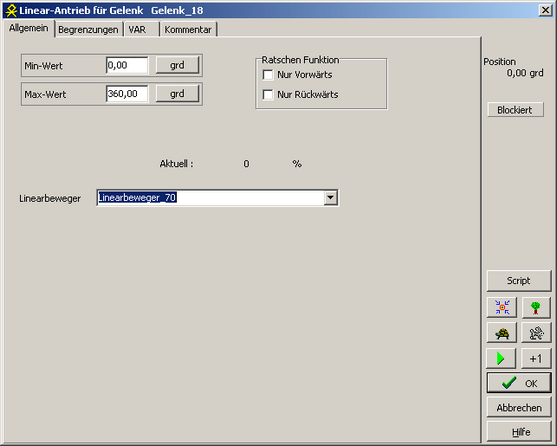
| • | Servo-Antrieb für Linearbeweger |
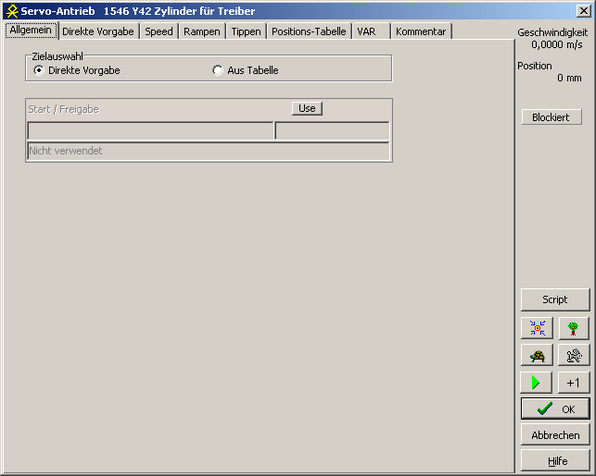
| • | Servo-Antrieb für Gelenk |
| • | Absolut-Real-Antrieb für Gelenk (nicht mehr unterstützt, bitte verwenden Sie den Servo-Antrieb) |
Siehe auch: